|
Problématique |
Comment le robot peut-il suivre la ligne avec précision, sans dépasser la vitesse autorisée ? |
|
1. Formulation d’hypothèses Proposer des hypothèses pour répondre à la problématique. Exemples d'hypothèses :
2. Analyse Cahier des charges : Identifier les contraintes liées à la problématique et aux exigences du cahier des charges :
Étude du système existant : Identifier les caractéristiques des capteurs infrarouges du robot. Identifier les caractéristiques de la motorisation. |
|
3. Expérimentation
|
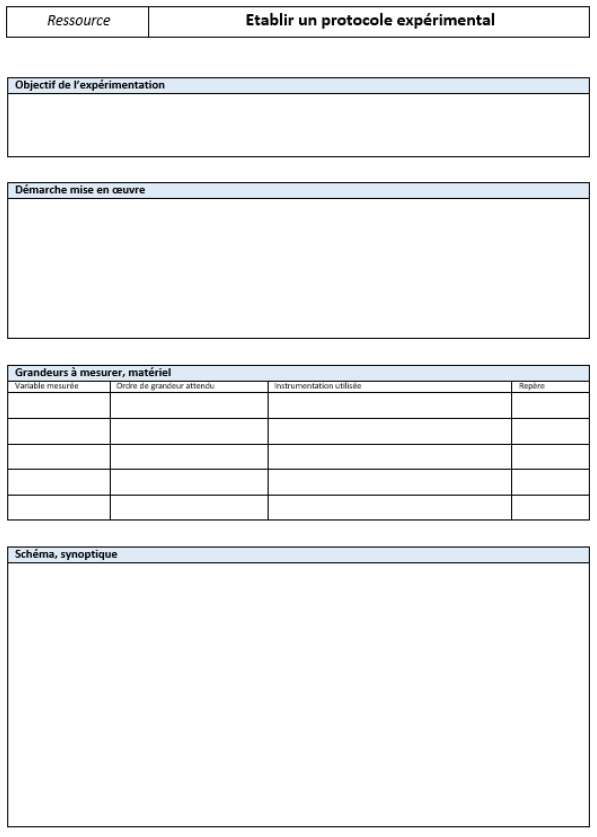
But : vérifier si les capteurs détectent correctement la ligne. Rédiger un protocole expérimental Réaliser l'expérimentation (voir tutos). Vérifier si les résultats sont conformes. But : valider le suivi de la ligne avec un algorithme de correction à logique binaire simple. Rédiger un protocole expérimental Réaliser l'expérimentation. Vérifier si les résultats sont conformes. . But : vérifier que le robot respecte la vitesse maximale autorisée tout en suivant la ligne. Rédiger un protocole expérimental Réaliser l'expérimentation. Vérifier si les résultats sont conformes. |
|
|
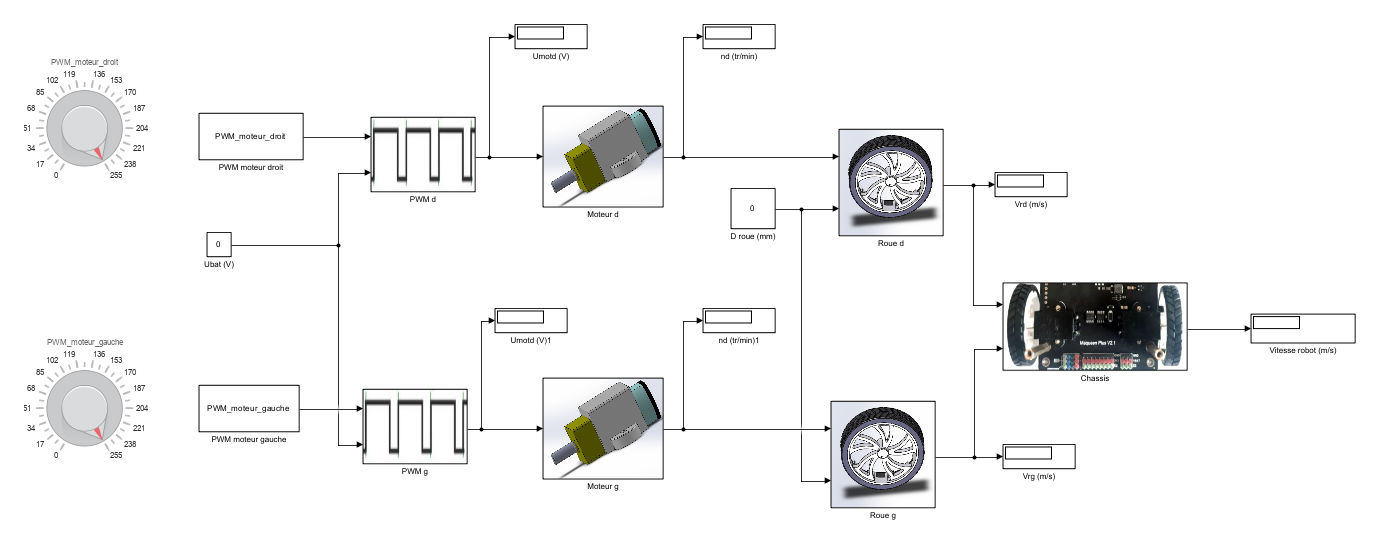
4. Modélisation et simulation But : pouvoir simuler la vitesse de déplacement du robot. Compléter le modèle Matlab. Pour cela voir la procédure. 5. Communication des résultats Présenter les performances obtenues (vitesse...). Calculer les trois écarts relatifs pour la précision:
Proposer éventuellement des améliorations basées sur les résultats des expérimentations et simulations.Valider votre modèle en vérifiant si les résultats sont conformes. |
|
Created with the Personal Edition of HelpNDoc: Write EPub books for the iPad