Suivi de ligne
Le robot se déplace en suivant une ligne ligne noire au sol.
Le robot dispose à l'avant de 5 capteurs optiques infrarouge. (voir chapitre Détection ligne) mais deux capteurs suffisent R1 et L1.
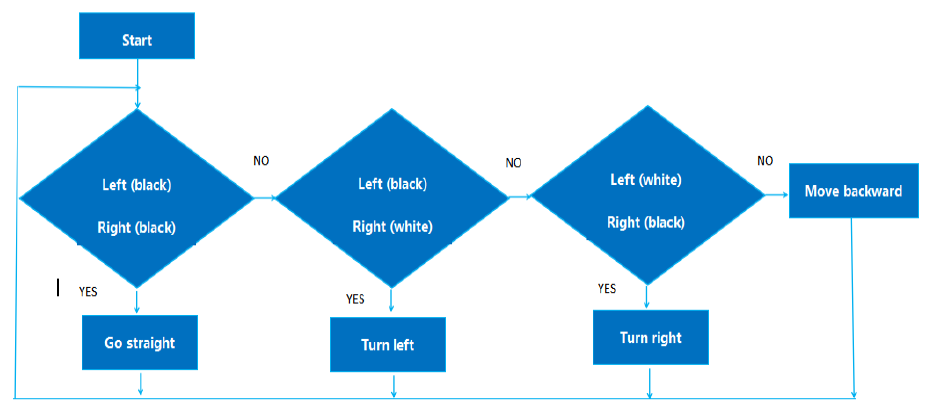
Voici une proposition d'algorithme de suivi de ligne si la largeur de la ligne est supérieure à l'entraxe des 2 capteurs R1 et L1 :
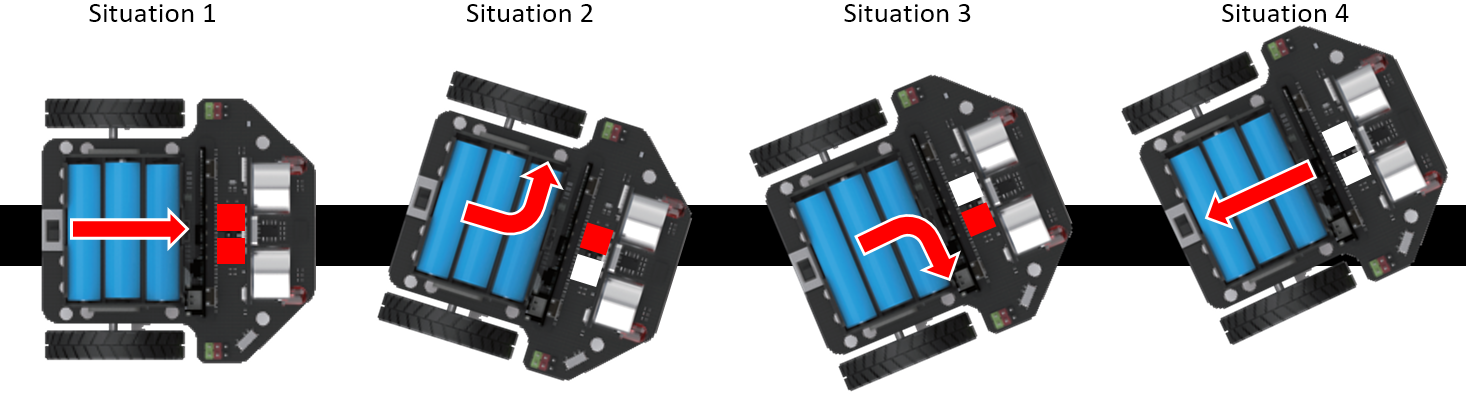
Plusieurs situations sont possibles :
- La ligne est détectée par les 2 capteurs R1 et L1 --> Avancer
- Seul le capteur gauche détecte la ligne --> Tourner à gauche
- Seul le capteur droit détecte la ligne --> Tourner à droite
- La ligne n'est plus détectée --> Reculer
Créé avec HelpNDoc Personal Edition: Créez des fichiers d'aide CHM professionnels avec l'outil facile à utiliser de HelpNDoc