Détection ligne
|
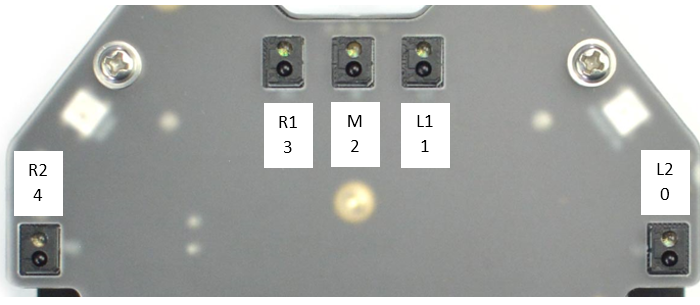
Le robot dispose à l'avant de 5 capteurs optiques infrarouge. Attention : pensez à calibrer les capteurs : voir Procédure |
|
|
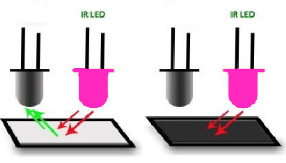
Fonctionnement d'un capteur optique infrarouge |
|
|
|
Le capteur optique infrarouge est constitué :
Le capteur envoie un signal haut lorsqu'il détecte le noir et un signal bas quand il détecte le blanc. |
Microbit Micropython Maqueen Plus V2 suivi ligne
Programme qui allume la LED droite quand le noir est détecté par le capteur R1
|
from microbit import * |
|
Fonction de la bibliothèque mb_maqueen_plus |
Rôle et arguments |
|
ligne(indiceCapteur) |
Permet de détecter une ligne noire. indiceCapteur : 0 à 4 ( 0:L2, 1:L1, 2:M, 3:R1, 4:R2). Renvoi 1 pour du noir, 0 pour du blanc |
Créé avec HelpNDoc Personal Edition: Améliorez votre documentation avec les fonctionnalités de l'analyseur de projet de HelpNDoc