|
Problématique |
Comment garantir un positionnement en distance précis du robot pour manipuler le colis avec une pince à servomoteur |
|
1. Formulation d’hypothèses Proposer des hypothèses pour répondre à la problématique. Exemples d'hypothèses :
2. Analyse Cahier des charges : Identifier les contraintes liées à la problématique et aux exigences du cahier des charges :
Étude du système existant : Identifier les caractéristiques du capteur de distance du robot. |
|
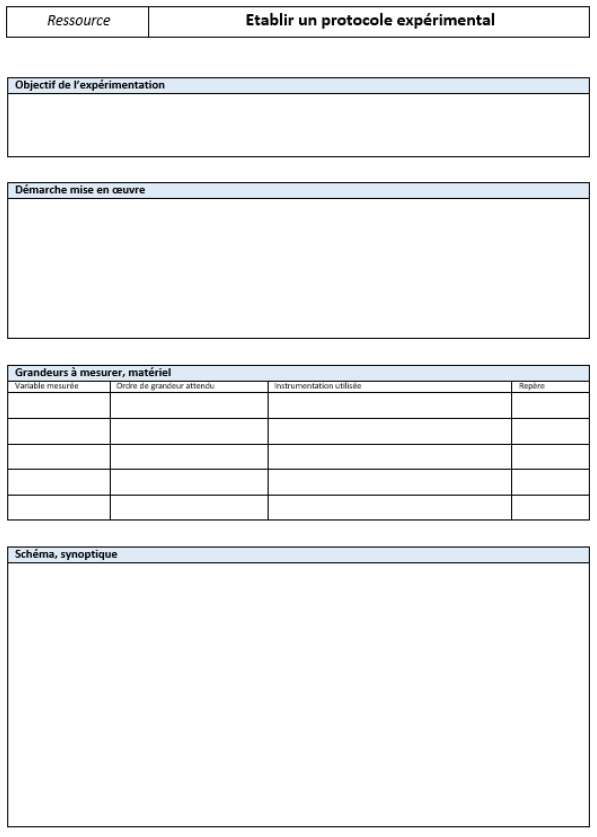
3. Expérimentation
|
But : vérifier la distance minimale et maximale de mesure du capteur Rédiger un protocole expérimental Réaliser l'expérimentation (voir tutos). Vérifier si les résultats sont conformes. But : vérifier si le capteur peut mesurer précisément la distance entre le robot et le colis. Rédiger un protocole expérimental Réaliser l'expérimentation. Vérifier si les résultats sont conformes. |
|
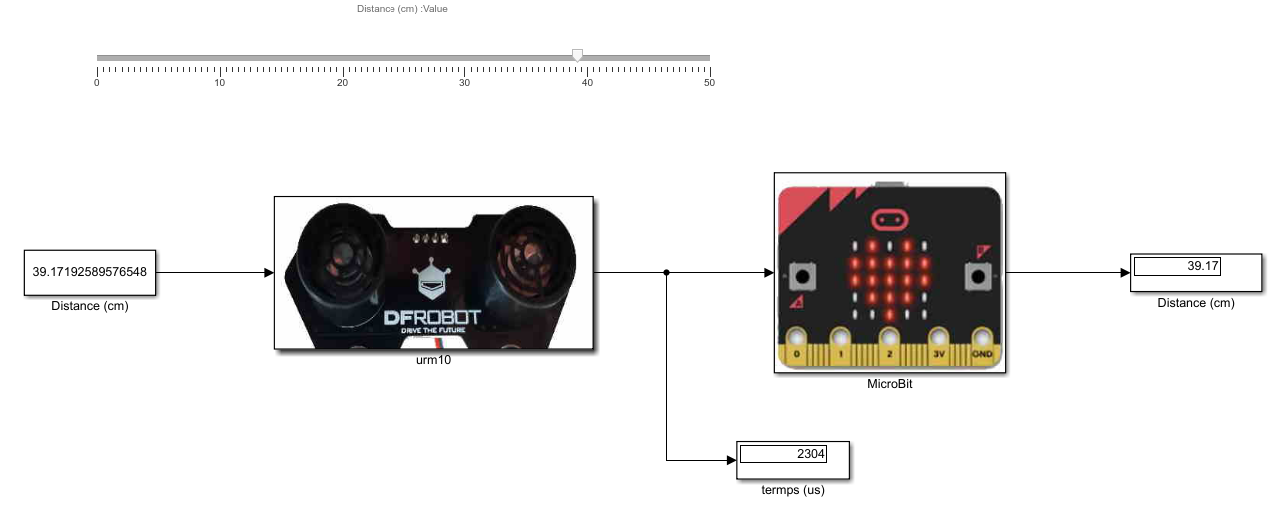
4. Modélisation et simulation
|
But : pouvoir simuler le fonctionnent du capteur de distance Décrire les interactions entre le capteur et le robot. Déterminer le modèle mathématique. Compléter le modèle Matlab. Pour cela voir la procédure. Valider votre modèle en vérifiant si les résultats sont conformes. |
|
5. Communication des résultats
Présenter les performances obtenues (précision, distance,...).
Calculer les trois écarts relatifs pour la précision :
- Ɛ1(attendu/mesuré)
- Ɛ2(mesuré/simulé)
- Ɛ3(attendu/simulé)
Proposer éventuellement des améliorations basées sur les résultats des expérimentations et simulations.
Created with the Personal Edition of HelpNDoc: Transform Your Word Doc into a Professional-Quality eBook with HelpNDoc