|
Problématique |
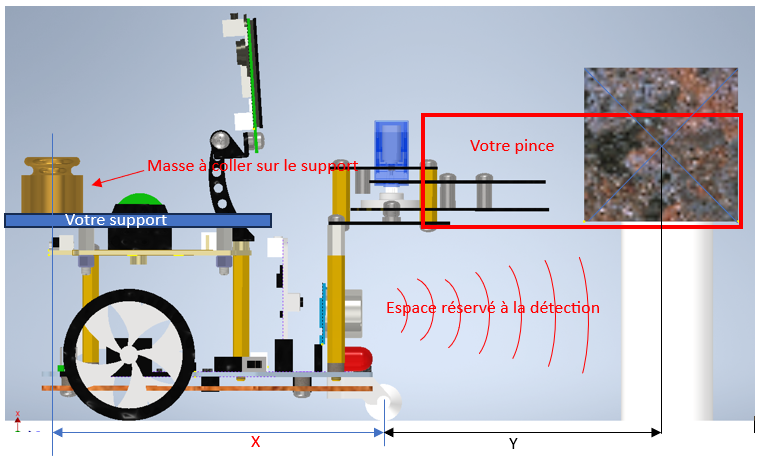
Comment équilibrer la répartition de la masse afin que la roue avant du robot supporte la même charge, que ce soit avec ou sans colis ? |
L'expérience des défis robotiques précédents nous a montré que le robot patine lorsque la roue avant est trop chargée du fait de la charge du colis. A l'inverse, lorsque celle-ci fonctionne dans des conditions normales (robot sans charge), le robot avance correctement.
On cherche donc à équilibrer la masse du colis de façon à ce que la roue avant supporte la même charge que lorsque le robot n'a pas ses pinces.
|
1. Formulation d’hypothèses Proposer des hypothèses pour répondre à la problématique. Exemples d'hypothèses :
2. Analyse Cahier des charges : Identifier les contraintes liées à la problématique et aux exigences du cahier des charges :
Étude du système existant : Identifier les conséquences du chargement de la pince sur la stabilité du robot. |
|
|
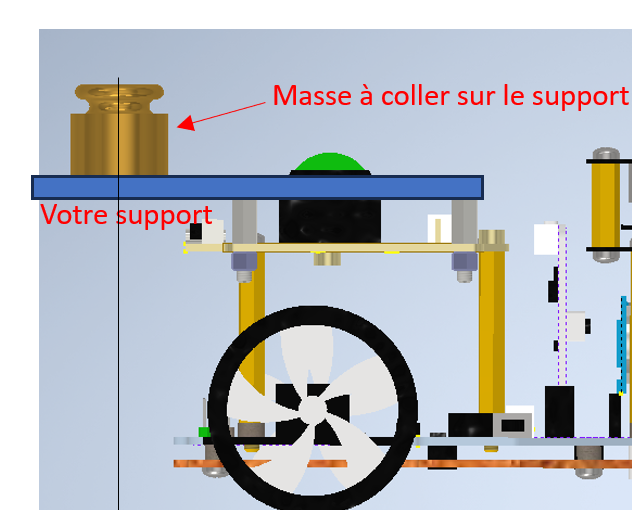
3. Innover Créer un support qui vous permettra de régler la position de la charge d'équilibrage sur le robot. Ce support devra être découpé au laser puis monter sur le robot. Procédure pour modéliser sous Inventor |
|
|
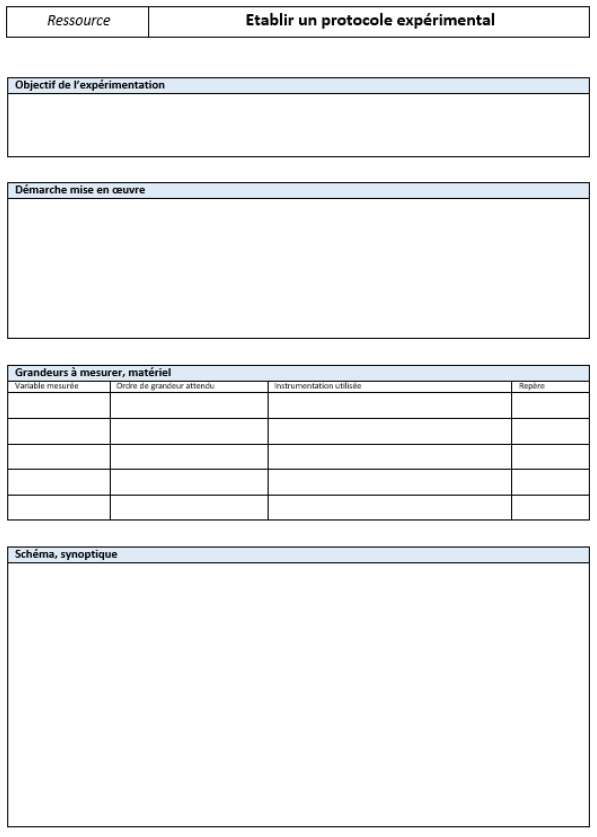
4. Expérimentation But : vérifier si l'effort sur la roue respecte le cahier des charges. Rédiger un protocole expérimental Réaliser l'expérimentation. Vérifier si les résultats sont conformes. |
|
|
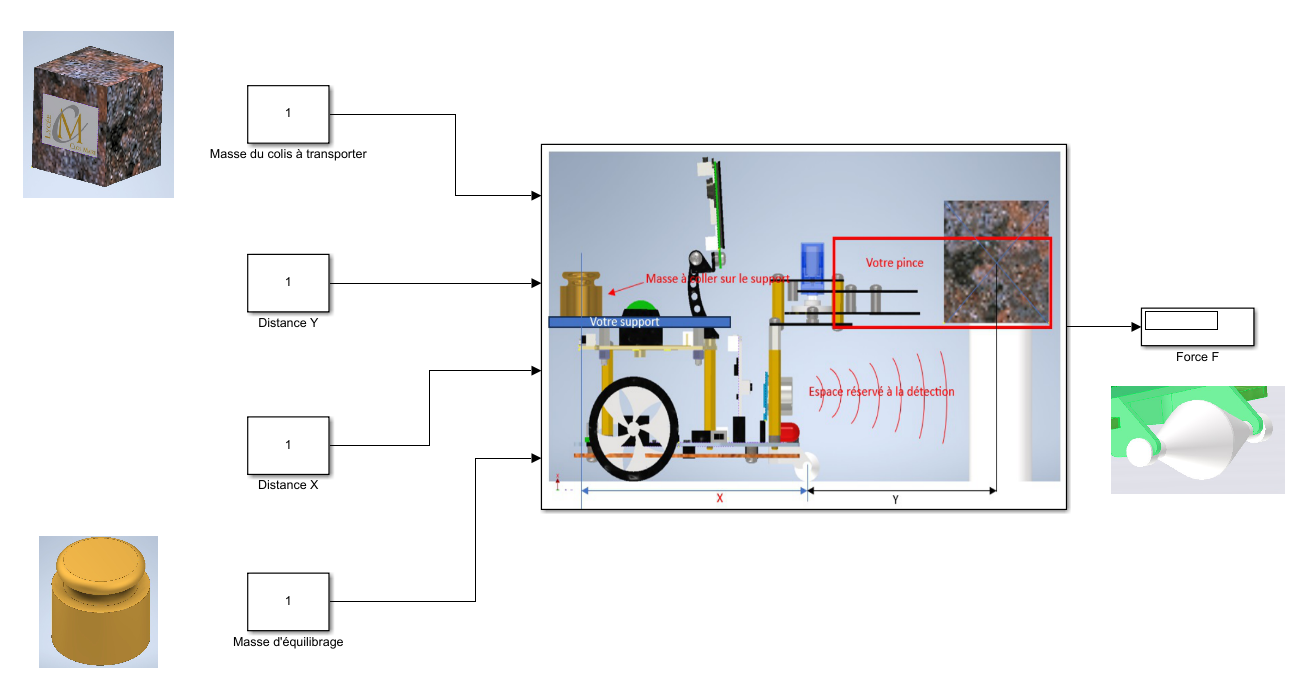
4. Modélisation et simulation But : pouvoir simuler l'équilibre du robot. Compléter le modèle Matlab et relever l'effort sur la roue. |
|
5. Communication des résultats
Présenter les performances obtenues (effort...).
Calculer les trois écarts relatifs pour la précision:
- Ɛ1(attendu/mesuré)
- Ɛ2(mesuré/simulé)
- Ɛ3(attendu/simulé)
Proposer éventuellement des améliorations basées sur les résultats des expérimentations et simulations.
Created with the Personal Edition of HelpNDoc: Elevate your documentation to new heights with HelpNDoc's built-in SEO