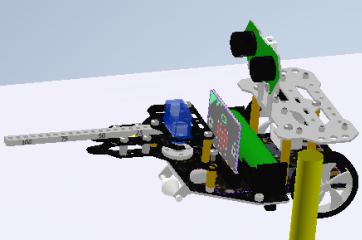
Préhension du colis
|
Problématique technique |
Vérifier le cahier des charges du produit afin de savoir s’il est adapté au besoin. Modéliser le produit, le simuler et faire évoluer le modèle vers un produit adapté. |
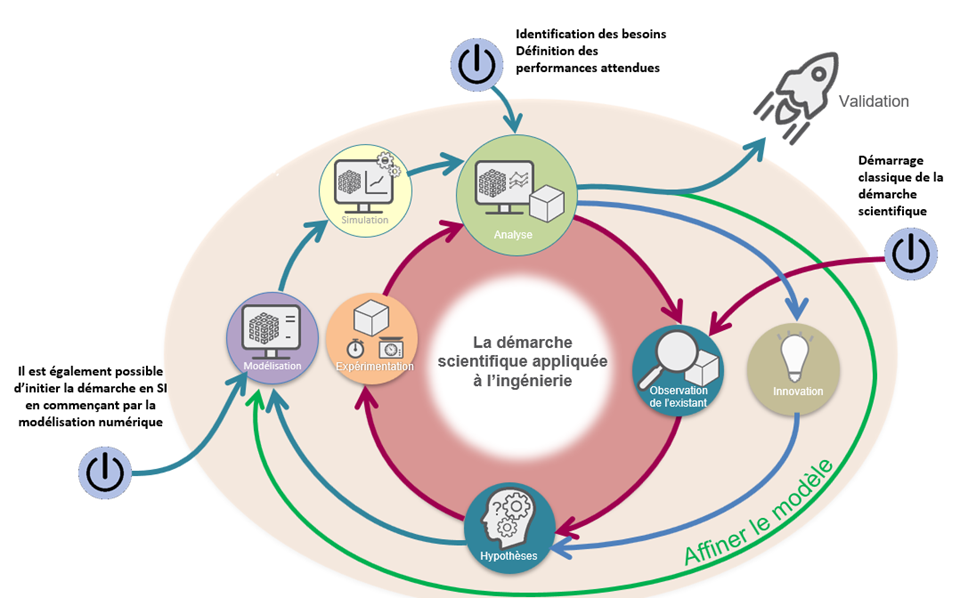
On vous demande d'appliquer la démarche scientifique afin de répondre à la problématique technique sur la préhension du colis.
En binome
2. Observation de l'existant
Monter la pince , voir la notice dans le dossier technique : DT Robot Maqueen Plus
innovation
Faire un brainstorming afin de trouver des solutions pour pour satisfaire les exigences.
Vous pouvez synthétiser le brainstorming à l'aide d'une carte mentale (voir Outils projets pour mettre au propre)
3. Hypothèses
Formuler des hypothèses
4. Modélisation, expérimentation, simulation, innovation
En fonction de vos hypothèses vous pouvez faire au choix une modélisation, une simulation, une expérimentation.
Vous avez à votre disposition :
|
Pour modéliser |
||
|
Dessiner un algorigramme Logiciel en ligne diagrams.net et fichier d'exemple : AlgoExemple.drawio
|
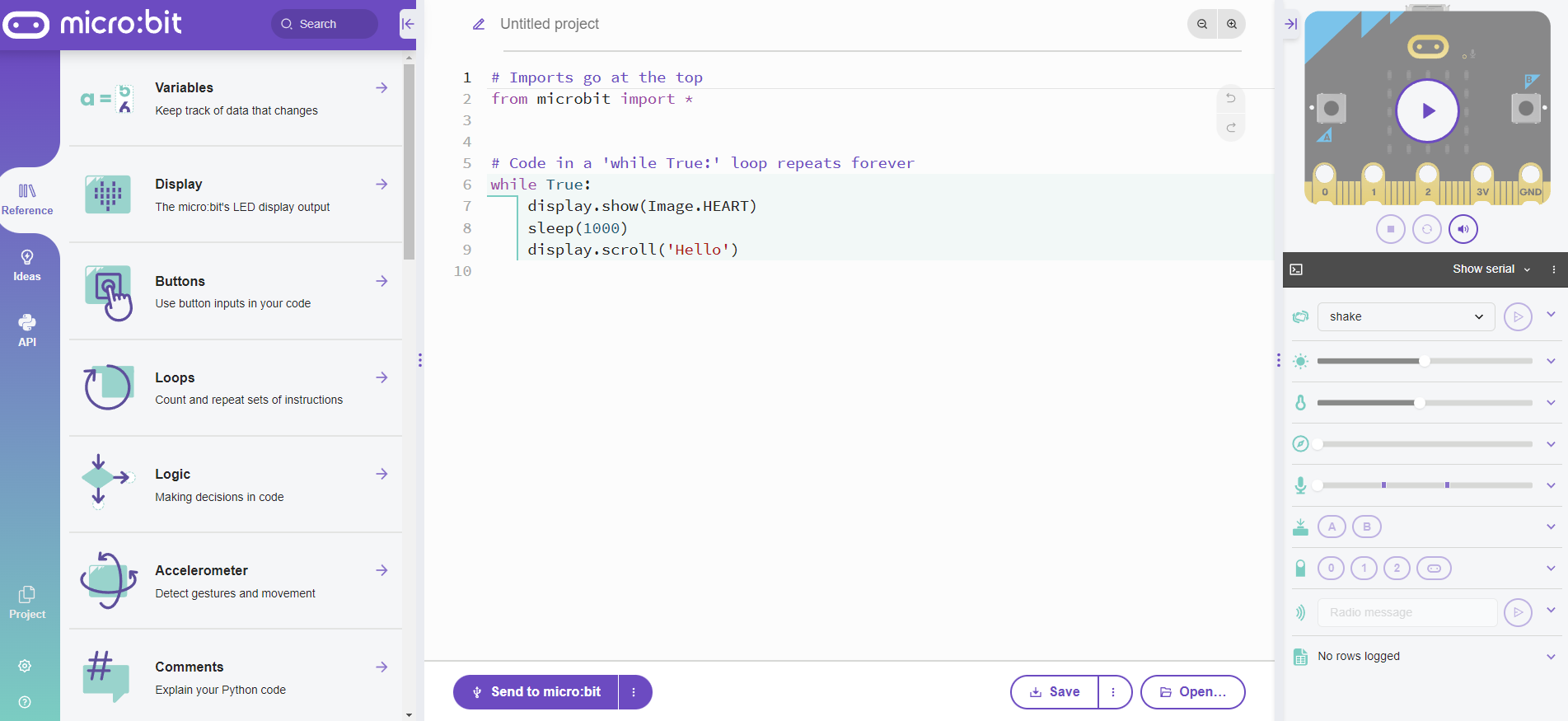
Traduire un algorithme en un programme exécutable sur Microbit Logiciel Micro:bit Python Editor V3 avec Chrome
Tuto Microbit avec Micropython Tutoriel servomoteur Microbit MicroPython DT Robot Maqueen Plus servomoteur |
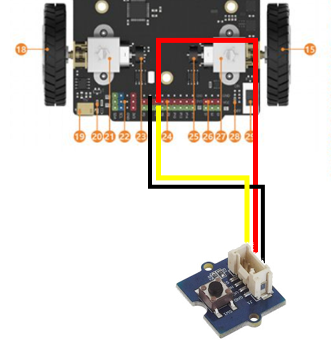
Dessiner un schéma électrique avec Word
|
|
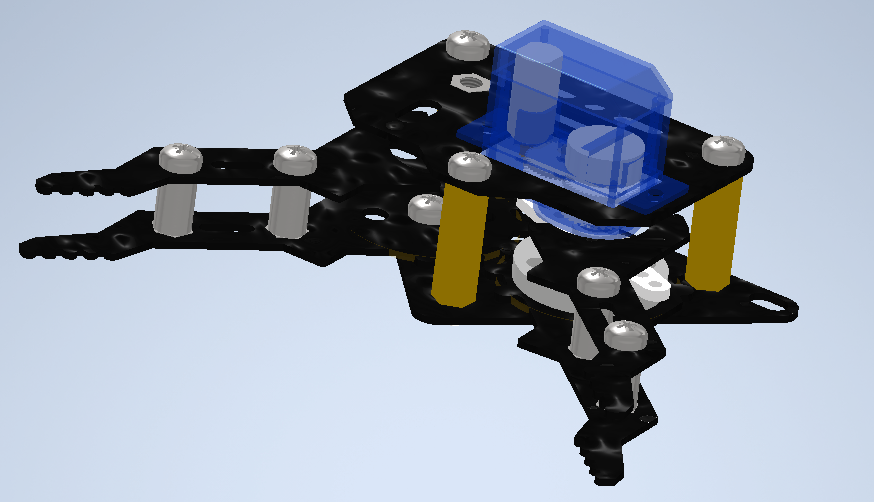
Modèle Inventor du robot pour modifier la pince capable de prendre le colis
|
|
|
|
Pour simuler |
|
|
Modèle Inventor du robot pour simuler l'équilibre du nouveau robot
|
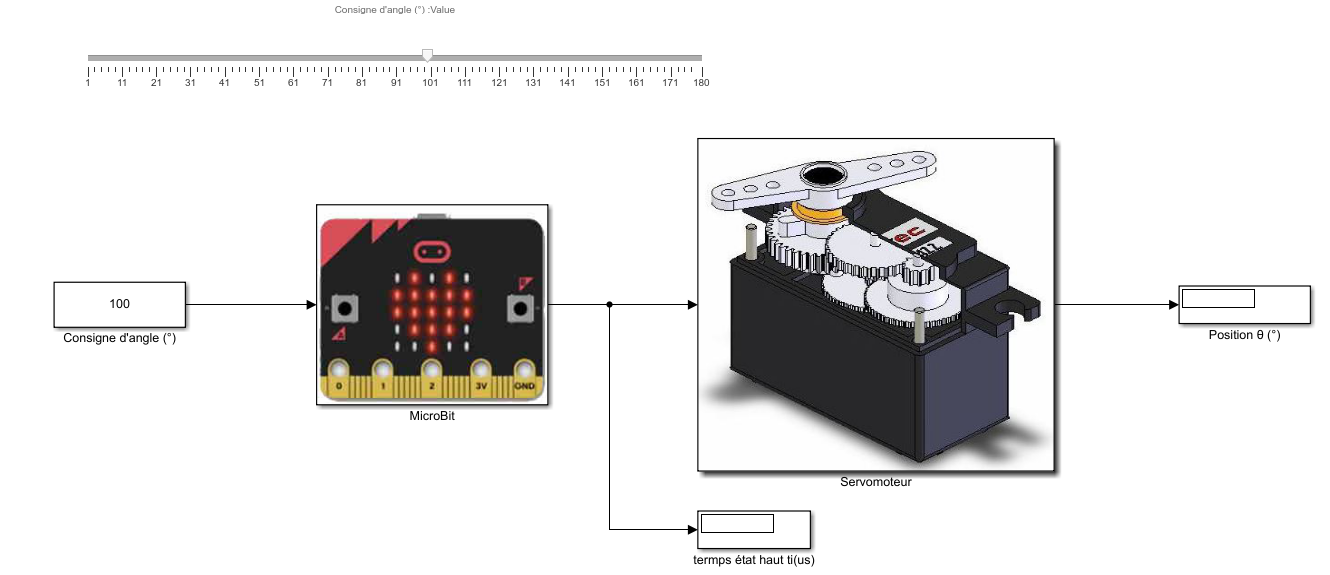
Modèle Matlab du servo-moteur
|
|
Pour expérimenter |
|
|
Tracer une courbe Tableur Excel
|
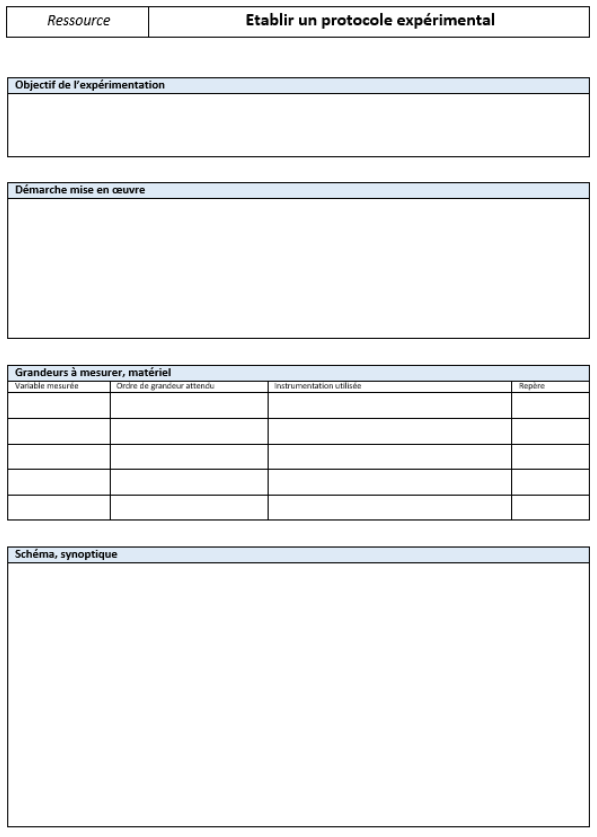
Rédiger un protocole expérimental
|

5. Analyse
Analyser les résultats précédents.
A vous de poursuivre la démarche scientifique.
En groupe
6. Fin du projet
Les exigences sont satisfaites ?
Conclusion.
Created with the Personal Edition of HelpNDoc: Generate Kindle eBooks with ease