Servomoteur
|
Raccordement :
Pour le servomoteur Feetech FS5115M
|
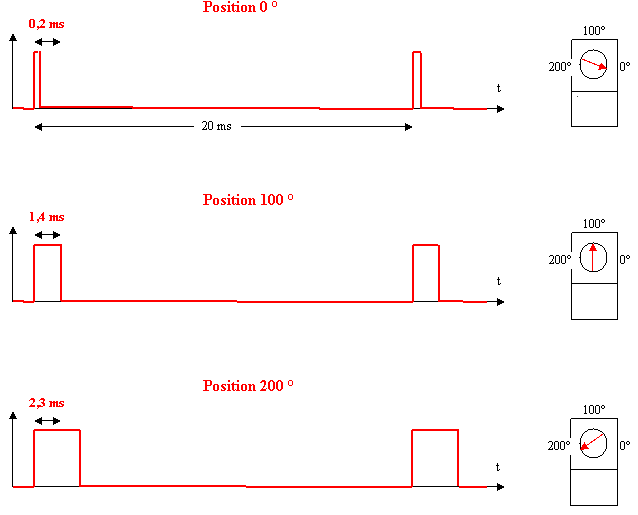
Pilotage : il faut générer un signal MLI (Modulation de Largeur d'Implusion, PWM Pulse Width Modulation en anglais) de période 20ms (= 50Hz). Principe général (attention, les valeurs peuvent varier en fonction du servomoteur) :
|

Programme permettant de piloter un servomoteur en position et vitesse
Programme permettant de piloter un de piloter un servomoteur avec 2 boutons-poussoirs
Programme permettant de piloter un servomoteur à partir d'un potentiomètre
|
Programme permettant de piloter un servomoteur en position et vitesse |
La commande s'effectue à l'aide de l'instruction suivante : servo.deplacement ( Angle départ, Angle voulu, Temps déplacement ) avec :
|
Angle départ en ° exemple 0 à 180° |
Angle voulu en ° exemple : 0 à 180° |
Temps déplacement en ms |
|
pin1.set_analog_period_microseconds(20000) # MLI période 20ms |
|
Programme permettant de piloter un servomoteur avec BPA et BPB |
|
pin1.set_analog_period_microseconds(20000) # MLI période 20ms |
|
Programme permettant de piloter un servomoteur à partir d'un potentiomètre |
Pour piloter un servomoteur, il faut générer une impulsion comprise entre 0.2 et 2.3 ms (par exemple) avec une période de 20ms.
- pour 0.2 ms le rapport cyclique est de 0.2 / 20 = 0.01 (1%) soit write.analog( ) 0.01 x 1023 = 10
- pour 2.16 ms le rapport cyclique est de 2.3 / 20 = 0.115 (11.5%) soit write.analog( ) 0.115 x 1023 = 118
|
pin1.set_analog_period(20) # MLI avec période de 20ms |
Créé avec HelpNDoc Personal Edition: Environnement de création d'aide complet