Télémètre à ultrasons
|
|
|
|

|
Le module ultrason est constitué :
La distance parcourue par les ultrasons est proportionnelle au temps du parcours. La vitesse du son est de 340 m/s. Distance = temps d'écho du signal * Vitesse du son / 2 Si temps en uS et distance en cm : Distance = temps x 0, 0345/2 |
|

|
|
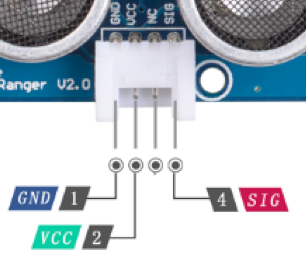
Pour déclencher une mesure, il faut présenter une impulsion "high" (3,3 V) d'au moins 10 μs sur l'entrée "Sig" Le module émet alors une série de 8 impulsions ultra-soniques à 40 kHz, puis il attend le signal réfléchi. Lorsque celui-ci est détecté, il envoie un signal "high" sur la sortie "Sig", dont la durée est proportionnelle à la distance mesurée. |

Microbit MicroPython capteur à ultrasons Grove (Ultrasonic ranger)
Programme qui permet de mesurer la distance. La mesure s'effectue à l'aide de la fonction distance (pinSig)
|
from microbit import * |
Créé avec HelpNDoc Personal Edition: Rationalisez votre processus de documentation avec le modèle HTML5 de HelpNDoc