Détection obstacle
|
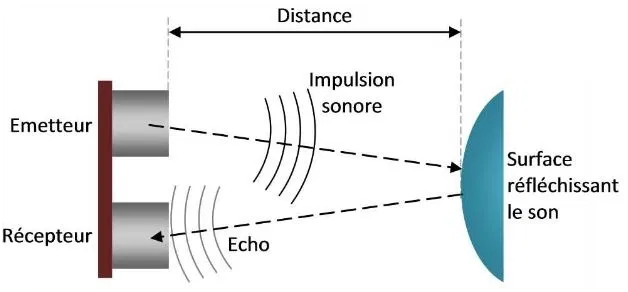
La détection des obstacle utilise un capteur à ultrasons HC-SR04
Le module ultrason est constitué :
|
La distance parcourue par les ultrasons est proportionnelle au temps du parcours. La vitesse du son est de 340 m/s. |
|
|
|
|
Raccordement sur le robot Maqueen Plus V2 TRIG relié à P13 (pin13 de la carte Micro:bit) ECHO relié à la P14 (pin14 de la carte Micro:bit) |
|


Microbit Micropython Maqueen Plus V2 HC-SR04
Exemple de programme qui afiche dans la console REPL la distance mesurée en cm
|
from microbit import * |
Attention, pensez à alimenter le capteur en mettant l'interrupteur sur ON.
|
Fonction de la bibliothèque mb_maqueen_plus_v2 |
Rôle et arguments |
|
distance() |
Permet de mesurer la distance en cm avec un obstacle à l'aide du capteur HC-SR04 |
Créé avec HelpNDoc Personal Edition: Générateur de documentation d'aide HTML gratuit