Driver moteur
|
|
|
Cette carte est un module de puissance avec 2 ponts en H destinés à piloter des moteurs à courant continu. Le module nécessite une source d'alimentation de 6V à 15V. Datasheet : wiki grove Configuration de l'adresse I2C avec les 4 dip switch sur ON : sur 8 bits = 0F16 = 0000 11112 |
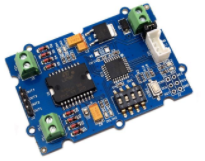
Télécharger la bibliothèque : esp32_driver_moteur_grove.zip et l'installer (voir le tutoriel)
|
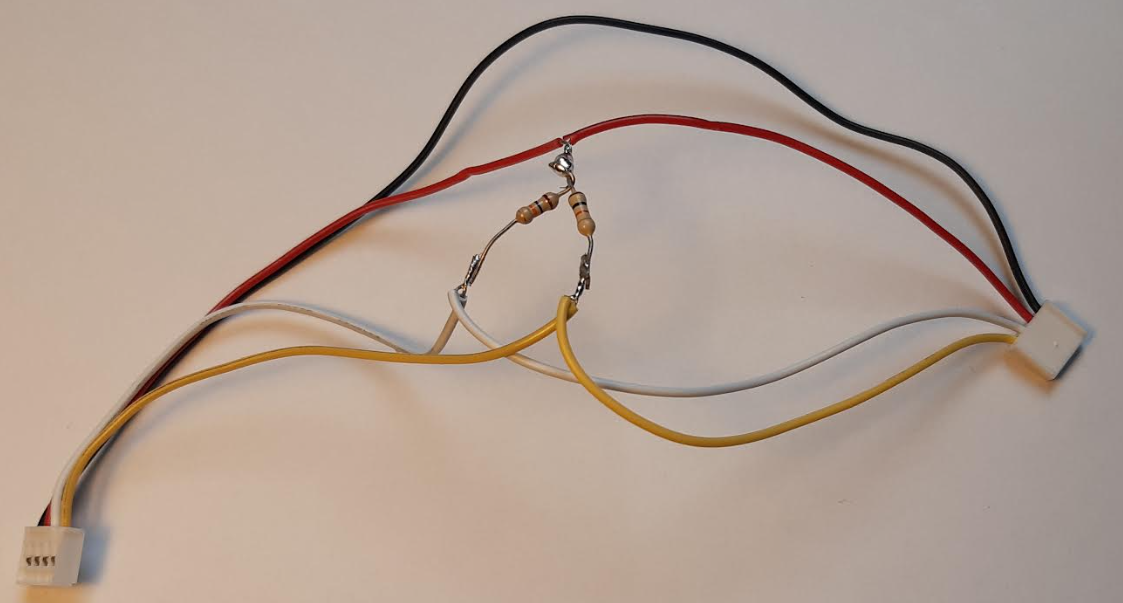
Raccordement :
Si la communication I2C ne fonctionne pas, appuyer sur le bouton Reset de la carte driver moteur Grove. |
Câble Grove avec ajout des résistances de pull-up sur SDA et SCL |
ESP32 MicroPython driver moteur Grove
Programme pour commander indépendamment un moteur
|
dm.vit(2, 50) # sens 2 moteur 2 à 50% sleep_ms(2000) |
Méthodes de la bibliothèque driver_moteur_grove
|
Méthode |
|
|
mb.driver_moteur() |
Initialisation |
|
.vit(moteur, vitesse) |
moteur : 1 (moteur 1) 2 (moteur 2) vitesse : -100 à 100 |
Créé avec HelpNDoc Personal Edition: Éditeur de documentation CHM facile